
Productum


4020 Bracchium roboticum onerationis et exonerationis porticus bilateralis
Exhibitio Producti


Parametri technici instrumentorum
| Maxima magnitudo laminae onerandae et exonerandae | 4000*2000 | mm |
| Minima magnitudo laminae onerandae et exonerandae | 1500*1000 | mm |
| Crassitudo maxima laminae onerandae et exonerandae | 50 | mm |
| Crassitudo minima laminae onerandae et exonerandae | 0.8 | mm |
| Pondus maximum laminae onerandae et exonerandae | tria milia | kg |
| Pondus oneris unius strati currus materiae permutationis | 6 | T |
| Altitudo oneris unius strati currus materiae permutationis | ducenti | mm |
| Celeritas translationis brachii mechanici | 10-30 | m/min |
| Celeritas elevationis brachii mechanici | 5-10 | m/min |
| Celeritas commutationis vehiculi materiae electricae | 10 | m/min |
| Potentia instrumentorum | 10 | Kilowati |
| Tubus adductionis aeris instrumentorum | 12 | mm |
| Fons aeris instrumentorum | 0.6-0.7 | MPA |
| Requisita Potestatis | Triphasis quinque filorum 380V |
|
Machina Video
Index configurationis partium clavium instrumentorum
| Numerus serialis | Nomen | Nota | Nota |
| 1 | Dux linearis elevationis | Taiwan HIWIN vel Iaponia SMG |
|
| 2 | Cursorium lineare elevans | Taiwan HIWIN vel Iaponia SMG |
|
| 3 | Interfacies hominis machinae tactilis | Flexem Shanghaiensem |
|
| 4 | Moderator Vacui | KITA Taiwanensis vel SNS |
|
| 5 | Ductor linearis translationis | Taiwan HIWIN vel Iaponia SMG |
|
| 6 | Cursorem linearem transfer | Taiwan HIWIN vel Iaponia SMG |
|
| 7 | Moderator CNC | Iaponia OMRON |
|
| 8 | Fons Potentiae DC | Iaponia OMRON |
|
| 9 | Relay | Iaponia OMRON |
|
| 10 | Calix suctionis | REZES |
|
| 11 | Partes pneumaticae | Taiwan AIRTAC vel SNS |
|
| 12 | Motor Servo | Raynen | Typus magnae inertiae |
| 13 | Reductor praecisionis | Shanghai YINTONG vel Hangzhou KAXIELI | Octo minuta arcus |
| 14 | Fercula volubilia | Fercula C&U | Sine cura |
| 15 | Sensoria Photoelectrica | CHIIB | Series CHIIB |
| 16 | Interruptor | Schneider | Delixi |
4020 Bracchium roboticum bilaterale onerandi et exonerandi per porticum, Solutio Technica.
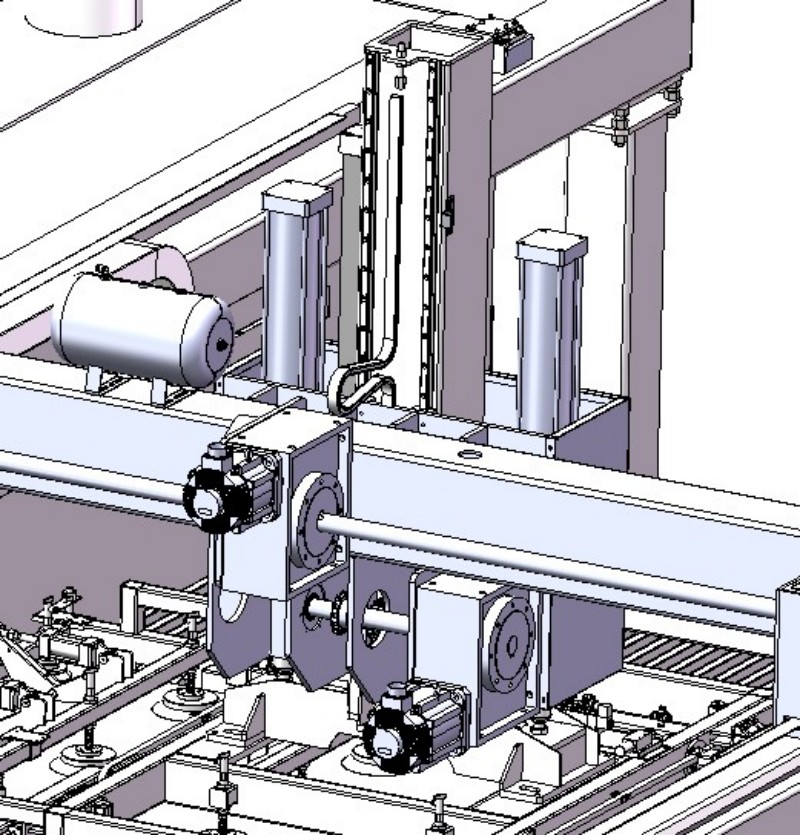
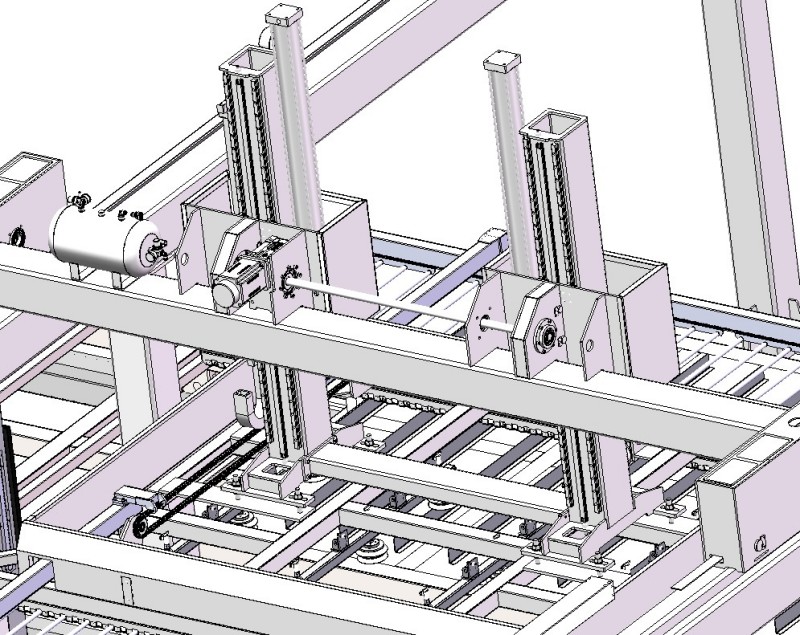
1. Manipulator a servomotore per reductorem accuratum agitur, cum cursu elevationis totali 700mm et decursu laterali 4500mm (secundum condiciones reales accommodato).
2. Plures series suctuum oleo resistenterum et vacuo instructae sunt; quaeque series valvula manuali instructa est, quae manu claudi et secundum magnitudinem laminae aptari potest. Accuratio positionis repetitae robotis cibatorii est ±2mm.
3. Extremum instrumento pneumatico separationis laminarum instructum est, ut separationem laminarum faciliorem reddat durante alimentatione automatica. Nota: Propter diversas vires adsorptionis et quantitatem olei inter laminas, non garantitur laminas plene et feliciter separari posse. Separatio manualis adiuvata secundum condiciones reales fieri potest.
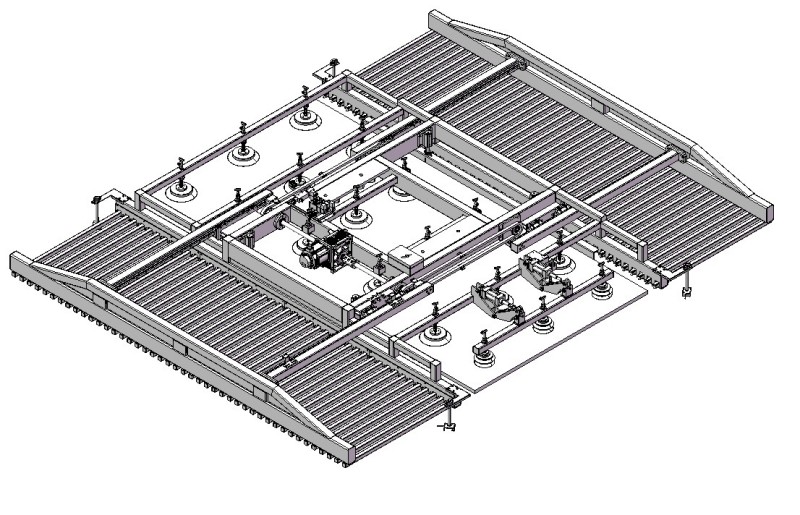
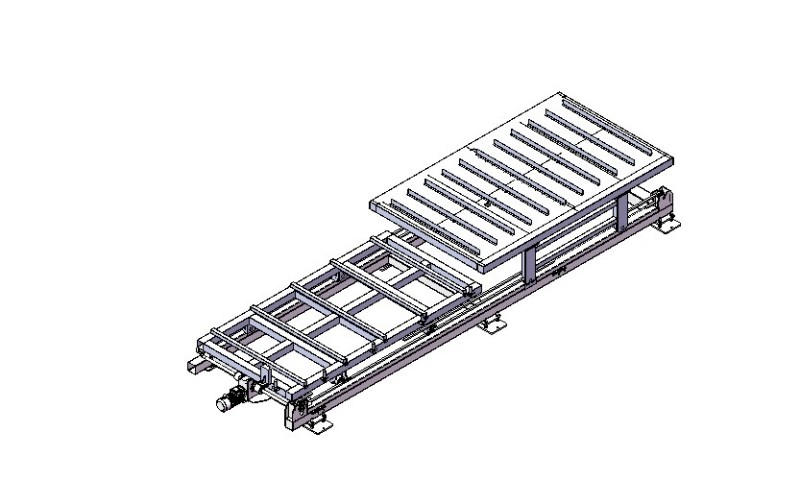
4. Onus et exoneratio automatica instructa sunt uno curru electrico duplici (strato superiore) ad materiam perfectam machinae lasericae conservandam, et uno curru electrico ad materiam primam machinae lasericae suppeditandam.
5. Vehiculum onerarium materiae motore retardationis impellitur et instrumento frenandi electromagnetico instructum est. Separatore magnetico mobili instructum, tabulam ad divisionem auxiliarem adsorbere commodum est et successum divisionis augere.
6. Exoneratio per manipulatorem exoneratorium duplici furcae et ventosam oneratoriam, quae eidem structurae columnae elevatoriae coniunguntur, adhibetur. Modus exonerationis est structura duplicis furcae sinistrae et dextrae; furca exoneratoria spatium breve currit et ratem defectus humilem habet.
7. Instrumentum plene servomotoribus agitur. Elevatio et motus lateralis manipulatoris omnes a motoribus servomotoribus magnae potentiae aguntur. Systema mechanicum elevationis railibus linearibus instructum est, quae celeritate cursus et accuratione positionis magna praestant.
8. Systema moderandi utitur tabula tactili decem unciarum importata, systemate CNC intelligente et moderatore programmatis Omron instructo. Modos operationis et automaticos et manuales habet. Omnes configurationes, monitoria, et debugationes manu in tabula agi possunt, quod celeriter et facile fit.
9. Ambitus laboris huius machinae requisitis temperaturae -10-45℃, humiditatis relativae minus quam 80%, nullis materiis inflammabilibus et explosivis, perturbationibus electromagneticis validis, nullis gasibus corrosivis, nullis liquidis aspersionibus, et bonae illuminationis ambitus interni satisfacere debet.
Introductio Usus
1. Usor inter modum onerandi automaticum et modum onerandi manualem commutare potest operando velum tactile ut variis condicionibus laboris accommodetur.
2. Modus onerandi: Furca materiae divisa in fundo aperienda adhibeatur, et poculo aspirationis interno laminam absorbebit. Axis elevationis tollitur et horizontaliter ad machinam laser movetur ut lamina in suggestu laser ponatur.
3. Methodus exonerationis materiae structuram furcae electricae duplicis sinistrae et dextrae adhibet. Furca exoneratoria spatium currentis breve et ratem defectus humilem habet. Furca aperiens et claudens dentibus furcae tubuli quadrati ferrei utitur, qui magnam capacitatem oneris ferendi et vim validam contra deformationem habent. Area contactus inter furcam materiae et laminam parva est nec laminam laeditur. Furca duplex synchrone in utraque directione secundum ferream linearem aperitur et clauditur et a motore frenante electromagnetico impellitur.
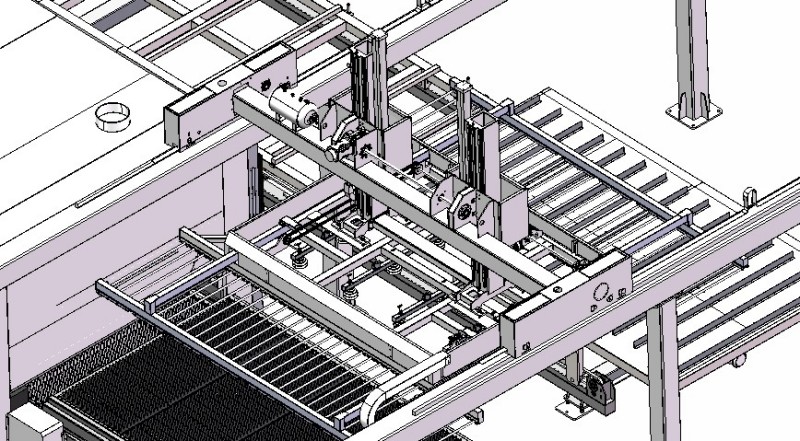
4. Corpus manipulatoris onerandi exonerandique corpus ex tubo chalybeo manganeseo et lamina chalybea optimae qualitatis constat, quae in toto conglutinantur, deinde levigatione tensionis vibrationis tractantur, et a magna machina CNC ad portam elevandam processantur. Bona rigiditate et magna praecisione praeditum est. Trabis portalis et crura clavis adaptatoriis connectuntur, quod commodum est ad horizontalitatem trabis portalis adaptandam. Manipulator onerandi exonerandique a servomotore per reductorem praecisionis agitur et railibus linearibus importatis instructus est. Mechanismus elevationis cylindro aequilibrante synchrono instructus est, ut stabilitatem elevationis celeris augeat et problemata vibrationis in motu mechanismi elevationis vitet.
Delineatio Effectus et Delineatio Linearum Dimensionalis




Res praeparatoriae ad institutionem instrumentorum
1. Fontem potentiae 380V60A et funem potentiae quinque filorum 10mm² ad instrumentum coniungendum para.
2. Fons aeris compressi cum pressione operativa 0.6MPa et tubus aeris apparatui connexus.
3. Signa monita salutis et rationes operandi in area laboris instrumentorum pone.
Cautelae Salutis
1. Operatoribus vetitum est aream laboris machinarum mobilium intra spatium laboris ingredi.
2. Operarii qui aream laboris ingrediuntur, instructionem de salute subire debent.
3. Antequam robotum operaris, confirmare debes utrum condiciones operationis impleantur.
Servitium
---Servitium Praevenditionis:
Consultatio Prae-Venditionis Gratuita / Exemplum Gratuitum Larking
REZES Laser praebet responsum celerem ante venditionem duodecim horas et consultationem gratuitam, omne genus subsidii technici est.
usoribus praesto.
Exempla gratuita confectio praesto est.
Exemplum gratuitum probationis praesto est.
Omnibus distributoribus et usoribus designationem solutionum progressivam offerimus.
---Officia post-venditionis:
Garantia 1.3 annorum pro machina fibrae lasericae secandae
2. Plenum auxilium technicum per inscriptionem electronicam, vocationem et video
3. Sustentatio per totam vitam et copia partium reservarum.
4. Libera designatio ornamentorum prout clientes requirunt.
5. Libera institutio et operatio exercitationis pro baculis.
Quaestiones Frequentes
1. Q: Cur te eligere debemus?
A: Si nos elegeris, summam qualitatem, optimum servitium, pretium rationabile et certam cautionem accipies.
2.Q: Machinam non novi, quomodo eligam?
A: Materias, crassitudinem et magnitudinem laboris nobis tantum dic; machinam idoneam commendabo.
3. Quomodo machinam operari?
A: Manuale Anglicum et pelliculam cum machina tibi trademus. Si adhuc auxilio nostro eges, nobiscum quaeso contactum fac.
4.Q: Possumne exemplum accipere ad qualitatem machinae inspiciendam?
A: Scilicet. Quaeso, insignia vel consilium tuum nobis praebe; exempla gratuita tibi praeberi possunt.
5.Q: Num machina secundum meas necessitates aptari potest?
A: Certe, validam turmam technicam et divitem experientiam habemus. Nostrum propositum est te contentum facere.
6.Q: Potesne nobis vecturam ordinare?
A: Scilicet. Vecturam pro clientibus nostris mari et aere disponere possumus. Conditiones negotiationis FOB, ClF, CFR praesto sunt.
-

Machina secandi laseris fibrae altae praecisionis secabat...
-

Machina Secandi Laser Totius Tegminis
-

Machina Secandi Laser Fibrae Metallicae cum Permutatione...
-
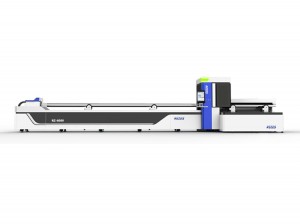
Machina Secandi Tubi et Fistulae Metallicae Laser
-

Tubi et Fibrae Tubi Metallici Pretio Moderato Secti Laser...
-
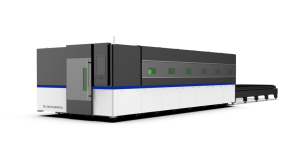
Tegumentum plenum laminae chalybis fibrae metallicae secandae lasericae...




