Productum




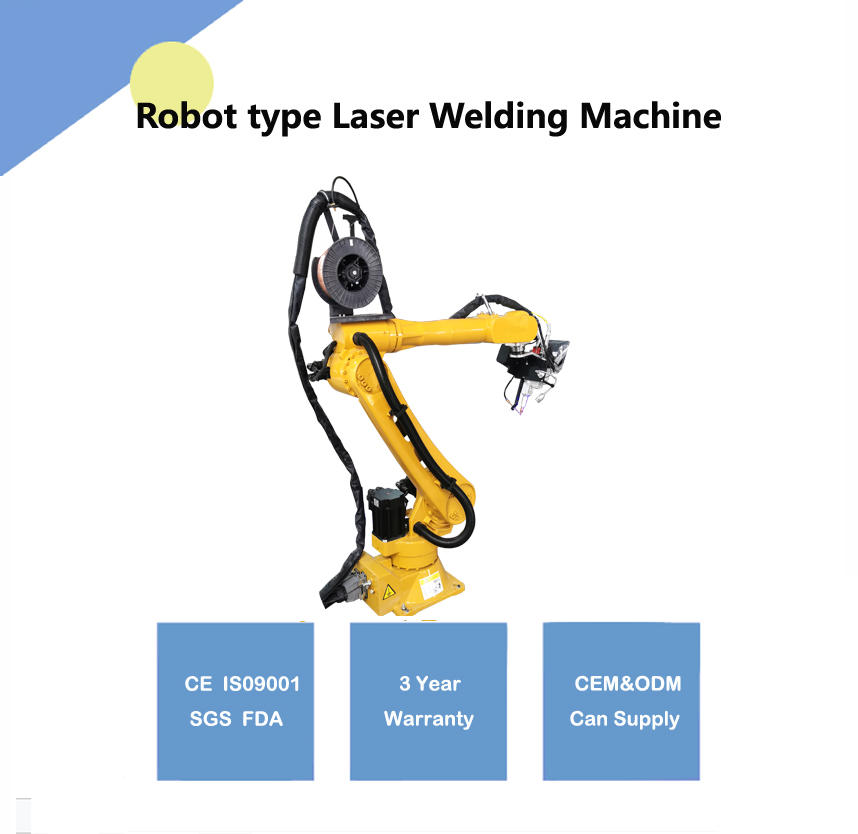
Machina Soldandi Laseris Typus Roboticus
Exhibitio Producti
Parametrus technicus
| Automatum Sex Axium | Tuling | Partes Centrales | Fons Lasericus |
| Usus | Metallum Consuendum | Potentia Emissa Maxima | 2000W |
| Materia Applicabilis | Metallum | CNC an non | Ita |
| Modus Refrigerationis | Refrigeratio Aquae | Systema Electrica et Pneumatica | Schneider |
| Longitudo undae | 1090Nm | Vis Laseriana | 1000W/ 1500W/ 2000W |
| Pondus (kg) | DC chiliogrammata | Certificatio | Ce, ISO9001 |
| Partes Centrales | Fons Laser Fibrae, Fibra, Caput Soldaturae Laser Manubrii | Puncta Venditionis Clavis | Altae Accurationis |
| Functio | Soldatura Laser Partium Metallicarum | Longitudo fibrae | ≥10m |
| Industriae Applicabiles | Deversoria, Tabernae Vestimentorum, Tabernae Materiarum Aedificandarum | Partes Centrales | Fons Lasericus |
| Modus Operationis | Pulsatus | Post Servitium Garantiae | Auxilium Interretiale |
| Diameter Maculae Focalis | 50μm | Maxima Opertura | 1730mm |
| Inspectio Exeuns per Videos | Provisum | Forma Graphica Sustentata | Ai, Plt, Dxf, Dwg, Dxp |
| Locus Originis | Jinan, Shandong Province | Tempus Garantiae | Tres anni |
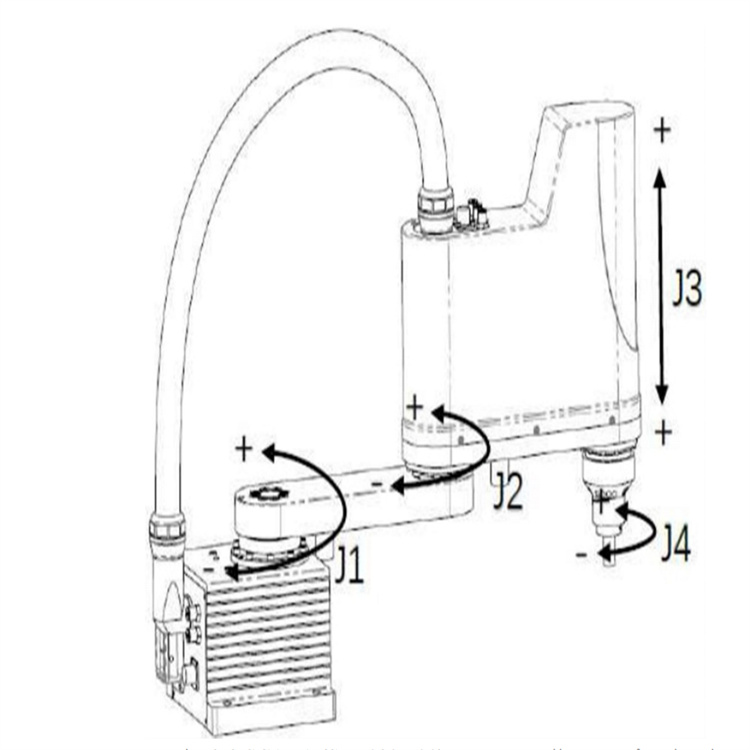
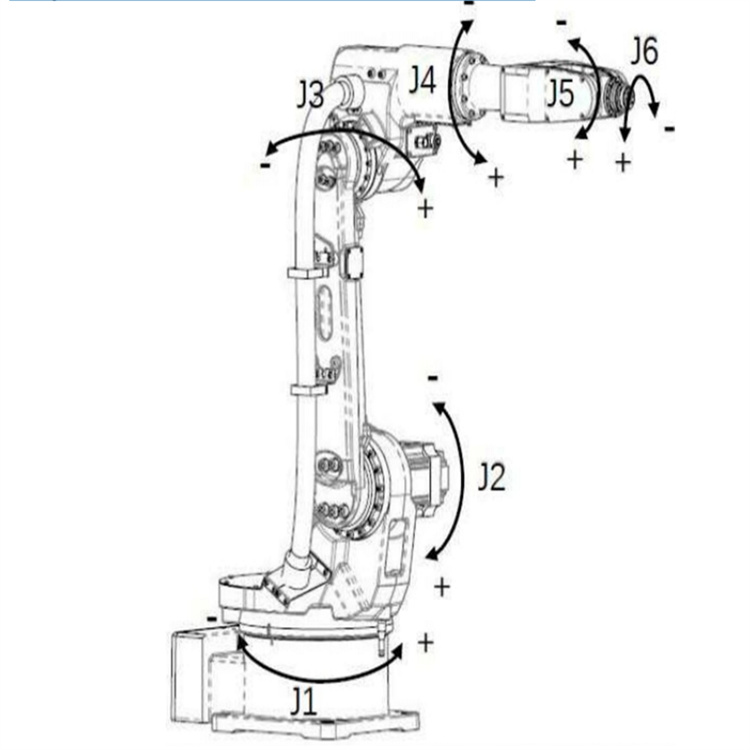
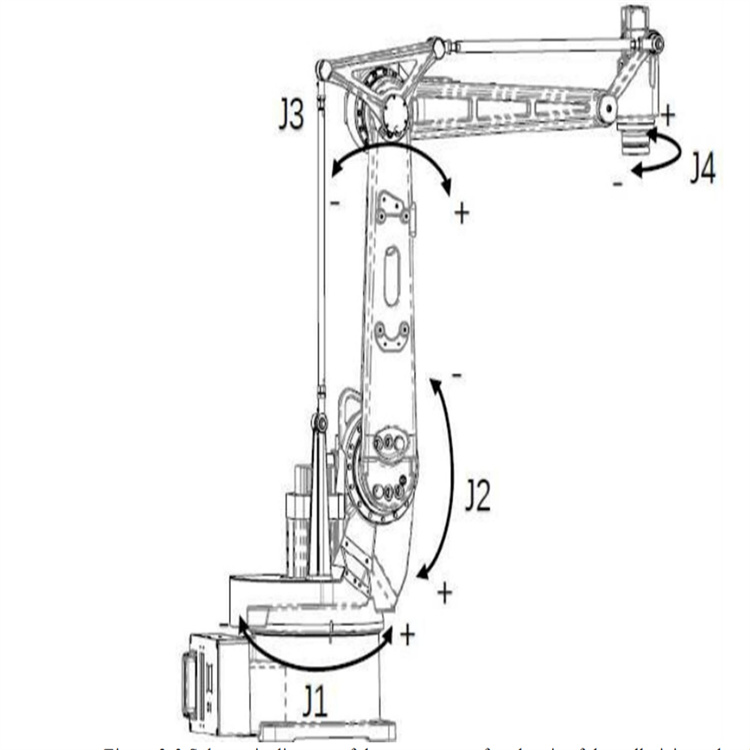
Bracchium roboticum
Axis roboti potest esse axis rotatorius vel axis translationis, et modus operationis axis a structura mechanica determinatur. Axis roboti in axem motus corporis roboti et axem externum dividitur. Axis externus in mensam mobilem et positionatorem dividitur. Nisi aliter specificatum est, axis roboti ad axem motus corporis roboti refertur.
Automata Turingiana in tres genera automatorum industrialium dividuntur:
Automatum industriale sex axium: sex axes rotationis comprehendens
SCARA: tres axes rotationis et unum axem translationis continet
Manipulator paletizationis: quattuor axes rotantes comprehendens. Motus articularis roboti in figura ostenditur.
Usus machinae roboticae ad soldandum
1. Campus Fabricationis Machinarum
Cum intensificatio operum ferrariarum in industria machinarum fabricandarum fiat, operatio ferraria ipsa condiciones laboris malas et radiationem caloris magnam habet, quae occupatio periculosissima est. Multae quoque machinae magnae scalae in fabricatione machinarum adhibentur, quod etiam difficultatem ferrariae auget. Robot ferrarius est instrumentum mechanicum automaticum in opere ferrario adhibitum, quod intensitatem laboris operariorum liberat et gradum automationis in campo fabricationis machinarum augere adiuvat.
2. Autocineta et partes autocineticae:
Recentibus annis, ut necessitatibus publicis occurreret, industria autocinetica progressum diversum ostendit. Ferruminatio tradita altis requisitis ferrariae fabricationis autocinetorum et partium autocineticarum satisfacere non potest. Sutura ferraria pulchra et firma est. In multis officinis modernis productionis autocineticae, lineae roboticae ferrariae congregandae formatae sunt.
3. Apparatus electronicus:
Campus instrumentorum electronicorum requisita qualitatis soldadurae satis alta habet. Crescente postulatione instrumentorum electronicorum in societate, instrumenta electronica etiam gravia provocationes subeunt dum celeriter progrediuntur. Automata soldadurae qualitatem soldadurae stabilire possunt, efficientiam productionis simul servantes. Praecisa soldadura instrumentorum ter vel quater altior est quam ea laboris manualis.
4. Aerospatium:
In structura aeroplani, fere mille partes corporis ad suendum adhibentur, et fere decem milia partes implicantur. Pleraque ex partibus magni momenti onus ferentibus aeroplani partibus suturis utuntur. Corpus aeroplani magna pressione subiacet in volatu, itaque requisita suturae satis severa sunt, et robot suturae per technologiam automaticam suturae suturae sequendae flexibiliter parametros suturae constituere potest ut structuram aeroplani accurate suturet.
Conservatio machinae
- Mechanismus filum trahendi. Inter quae, utrum spatium filum trahendi normale sit, utrum fistula filum trahendi laesa sit, et utrum signum abnormale exstet; utrum fluxus gasis normalis sit; utrum systema tutelae securitatis facem soldandi normale sit. (Vetitum est facem soldandi claudere propter opera tutelae securitatis); utrum systema circulationis aquae normaliter operetur; probatio TCP (commendatur ut programma probationis compiletur et post singulas vices exsequatur).
2. Inspectio et conservatio hebdomadalis
1. Singuli axes roboti defricantur; TCP accuratiam inspiciatur; olei residui gradus inspiciatur; Sive positio nulla cuiusque axis roboti accurata sit, inspiciatur; Filtrum post receptaculum aquae machinae soldadurae purgatur; Filtrum ad introitum aeris compressi purgatur; Impuritates ad rostrum faces soldadurae purgantur ne circulationem aquae obstruatur; Mechanismum filum trahentem, rotam filum trahentem, rotam filum prementem, et tubum ductorem filum inclusam, purgatur; Sive fasciculus tuborum et tubus filum ductor laesi an fracti sint, inspiciatur. (Suadetur ut totum fasciculus tuborum removeatur et aere compresso purgetur); Sive systema tutelae faces soldadurae normale sit, et sive puga externa sistendi in casu necessitatis normalis sit, inspiciatur.